-
GUNDAM Head OnLine

-
ROS2 創建工作區與功能包
設置環境變量 #source /opt/ros/<ver>/setup.bash 創建工作區 #mkdi…
-
ROS2 環境配置
#source /opt/ros/<ver>/setup.bash 如需在每個專端機生效的話,須將…
-
Gravity I2C數字功率计
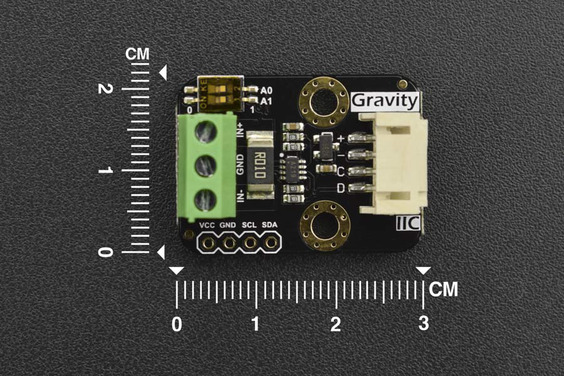
規格參數 供電電壓(VCC):3.3V ~ 5.5V 電壓量程(IN+或IN-相對GND):0 ~ 26V 電…
-
我的二足機器人架構

一隻手三個自由度 一隻腳五個自由度 頭部一個全彩LED作為燈號指示,一個小SERVO轉動LED燈 腰部一個自由…
-
ROS2初體驗

一年前剛接觸ROS1時已知道ROS2也出了,但是都怪小時候不念書,英文只認得26個字母, 組合在一起就陌生了 …
-
ESP32
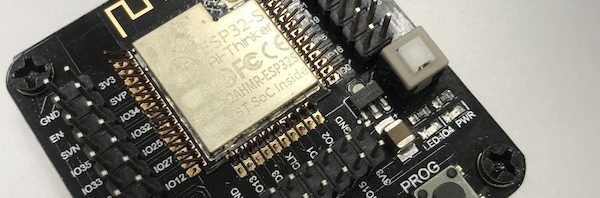
ESP32應該可以把它定位為一個單晶片,它不但有基本的GPIO可以連結外部電路,更有支援WIFI,BLE.製作…
-
SERVO
有別於一般傳統的Servo,它是透過連接線一個一個進行串接,一組控制板可以控制253個Servo.這不但解決了…
-
動作規劃
為了Robot的17個自由度規劃,寫了一個輸入介面. 但這只是try&error一個一個動作測試疊加上…
-
USB 遙控手把
想要遙控機器人,就必須找一個控制器. 曾經有想過寫程式用iPhone來控制,但是Swift已經離我好遠,再研究…