-
ROS2 創建工作區與功能包
設置環境變量 #source /opt/ros/<ver>/setup.bash 創建工作區 #mkdi…
-
ROS2 環境配置
#source /opt/ros/<ver>/setup.bash 如需在每個專端機生效的話,須將…
-
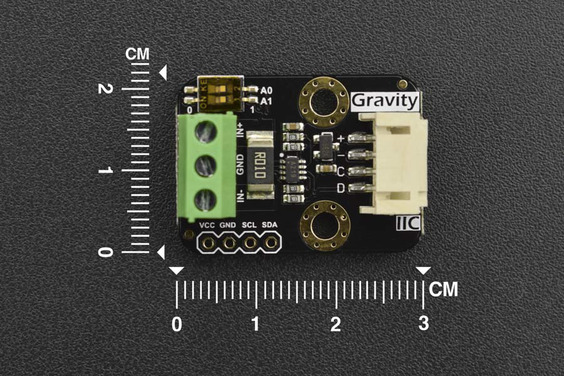
Uart 轉 I2C
Raspberry pi 只有一個Uart接口,被Servo控制器佔據後,要連至主機只能用wifi連入. 臨時…
-
LoRa 新一代無線傳輸技術
LoRa為英文Long Range的縮寫,為低功耗廣域網路(Low PowerWide Area Networ…
-
Tello 可程式四軸機
可以透過Python來控制,再加上與距離資料傳輸,一定會更有意思.